
Método de control de límite de rendimiento (TG)
Fijaré de arriba para ver, el mismo error de ángulo de giro en su sistema inmunológico stud fuerza axial de sueños error Δ F2 pernos de elasticidad que fuerza axial de sueños error Δ F1 mucho menor. El método de control del límite de elasticidad es una manera de detener el aprietamiento después de apretar el perno hasta el límite de elasticidad. Es un método de apriete de alta precisión desarrollado utilizando el fenómeno de la cesión del material. Este método de control, se basa en el cálculo continuo y el juicio de la pendiente de la curva de par/esquina de aprietamiento para determinar el límite de elasticidad.
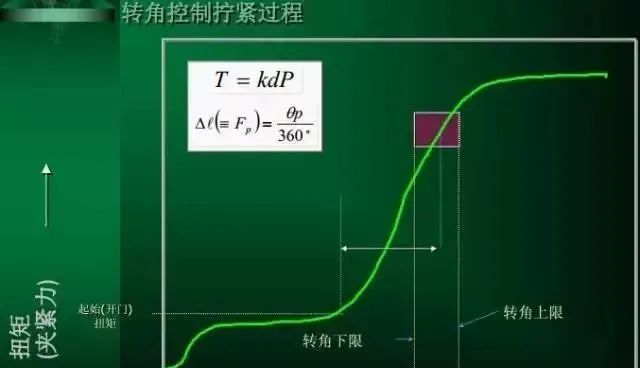
La curva de cambio de par/ángulo de un perno durante el atornillado se muestra en el gráfico de comparación de par, pendiente de par. El apriete real comienza con un rápido aumento de la pendiente y luego se mantiene constante después de un breve retardo (intervalo a_b). Después de cruzar el punto b, su pendiente desciende rápidamente después de un breve descenso lento. Cuando la pendiente desciende a un cierto valor (definido en general, cuando su pendiente desciende a la mitad de su valor máximo), se indica que se ha alcanzado el límite de elasticidad (es decir, el punto Q en el gráfico de contraste de torsión) y se envía inmediatamente una señal para detener el aprietamiento. La precisión de atornillado del método de control de límite de elasticidad es muy alta. El error de la precarga puede controlarse dentro de ±4%. Sin embargo, su precisión depende principalmente de la fuerza de elasticidad del propio tornillo.
◆ torsión con la esquina se monitorea en apretar
◆ distinguir el gradiente máximo y el límite de rendimiento cuando el gradiente máximo de un punto cae
◆ utilizar el máximo potencial de fuerza de prensado
◆ fricción no reducida
◆ permite la observación de la esquina de par para cada apriete
◆ pernos no se pueden utilizar más
◆ pre-carga correcta ±8%
04
Punto de aterrizaje - método de control de esquina (SPA)
El método de control de punto-esquina es un método de control recientemente emergente que se desarrolló sobre la base del método de torque-esquina t-a. El punto de intersección S de la pendiente de un segmento lineal de la curva de par con la coordenada A de la esquina se utiliza para calcular el punto de partida de la esquina en el método TA.
En la figura F1 es el error máximo de la precarga axial del cerrojo por el método TA y F2 es el error máximo de la precarga axial del cerrojo por el método SPA. Visibles desde el diagrama, TA cuando, debido al error de torque TS prevede (Δ TS = '(Ts1, generan los tornillos correspondientes al eje de fuerza fuerte error Δ sm), después de pasar el mismo ángulo de giro A1, coeficiente de elasticidad en relación con dos diferentes de atornillar GongKuang, pernos su fuerza axial de sueños de error para F1; Aunque es UN coeficiente de elasticidad de equivalencia, pero debido a la presencia de Δ Ts, también tiene su error (véase el gráfico F1 de Δ, Δ F2).
Si se aplica el método SPA, el error de precarga axial del cerrojo es F2 en relación con dos condiciones de apriete con coeficientes elásticos más o menos diferentes, ya que ambos han pasado la esquina A2 desde el punto de caída S. Obviamente F2 es menor que F1, es decir, punto de caída - control de esquina con mayor precisión de aprietamiento que torque - control de esquina. El efecto de la magnitud del coeficiente de fricción en la precarga axial del perno se puede eliminar casi por completo con el método SPA. La siguiente figura muestra la curva de la relación torca-ángulo correspondiente a los diferentes coeficientes de fricción en el atornillado. Coeficiente de fricción en la figura: µ1>µ2>µ3.
Aunque la pendiente de la curva de la relación torque-ángulo correspondiente a diferentes coeficientes de fricción difiere, su punto de caída (la intersección de la pendiente del segmento lineal de la curva con el eje horizontal) no difiere mucho. Por lo tanto, a partir de este punto, torcer un ángulo Ac, el efecto de los diferentes coeficientes de fricción en la precarga axial del perno se puede eliminar básicamente.
Las principales ventajas del método SPA en comparación con el método TA son: puede superar los errores de torsión ya generados en Ts y, por lo tanto, puede mejorar aún más la precisión de apriete.











